

The Robot
Under Construction
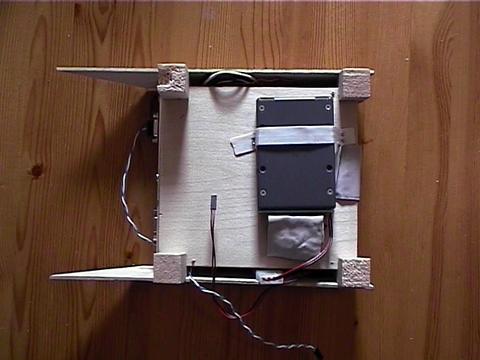
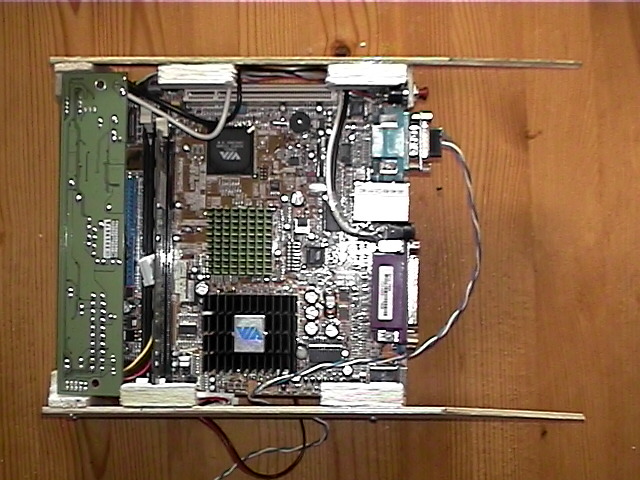
The brain of the robot is a Mini-ITX VIA Eden fanless 533 MHz CPU
running Redhat Linux Fedora. Motion is provided by the base of a
Tamiya radio controlled tank and a
MiniSSC II servo controller.
The camera on the robot is a Connectix (now Logitech) Quickcam VC and another
camera attached to the server is a logitech Quickcam Notebook Pro.
Although, it has possibilities too, check out this
internet controlled car. David Mc Anulty was also very helpful with all the questions I had.
After I picked up the remote control tank, I bought a
cappuccino TX3
- which I had originally tried to use as the robot CPU. But,
one of the biggest problems in building this (and still a major problem) is
power. I tested this computer using a couple of 18V batteries from an
electric drill, and then a variable voltage battery but the 5 amp hour batteries lasted about 15 minutes. Not enough time to even test things much less have a functioning
moving robot.
Around about this time the mini-itx
boards where coming out. Fanless, and low power, this board actually gets five
hours out of a five amp hour battery. Although, I eventually bought a 12 amp
hour battery
(which turned out to be two 6 Volt batteries). Twelve hours of course is
still not enough, but it's better than 5 hours.
Update: I did tests with the wireless lan and the USB cam attached and a write
to the hard drive every minute... the battery dies after 2 hours (dips below
11 volts), sigh. I'm not sure if it's that I'm not getting a good charge off ofa 110 charger going through a transformer.
So the cappuccino pc was reborn as my web server.
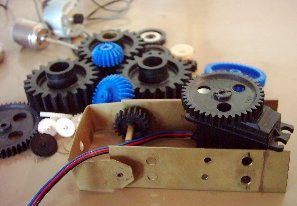 The next major problem was getting the servos to mechanically move the camera.
This was a major lesson in keeping things as simple as possible.
At first I came up with this complicated brass gearbox that never worked but
then I hit upon using threaded rod and
plastic clay
that gets hard when baked - I'd used it before to do some
claymation.
It also works great for making plugs.
The next major problem was getting the servos to mechanically move the camera.
This was a major lesson in keeping things as simple as possible.
At first I came up with this complicated brass gearbox that never worked but
then I hit upon using threaded rod and
plastic clay
that gets hard when baked - I'd used it before to do some
claymation.
It also works great for making plugs.
